Actuator Analysis
Home -> Technical Documentation -> Actuator Analysis
This section gives an overview over the capabilities of the Compliant Joint Toolbox for the analysis of compliant joint actuator models.
The genericJoint class builds upon the MATLAB core capabilities for numeric system analysis via transfer functions and state space systems in continuous and discrete time domain. The benefit offered by the Compliant Joint Toolbox is to waive the need to manually equate and insert the model parameters into the corresponding built-in MATLAB functions (tf, ss, etc.). Using the generated classes Compliant Joint Toolbox offers direct access to the transfer functions and state-space matrices in continuous and discrete time domain through a single line of code (getTF, getTFd, getStateSpace, getStateSpaceD), independent of the actually selected model structure. This enables the quick switching and comparison of transfer functions or state-space matrices for different model structures and parameter sets.
With the Symbolic Math Toolbox™ installed, the Compliant Joint Toolbox offers to inspect the dynamics also in symbolic form. This eases the analytical understanding of how individual parameters affect the dynamics. Implementationwise, the Compliant Joint Toolbox offers the genericJoint methods makeSym and makeNum to convert
instances of joint models between numeric and symbolic representations. Once converted into a symbolic joint instance, the genericJoint class methods will produce symbolic outputs.
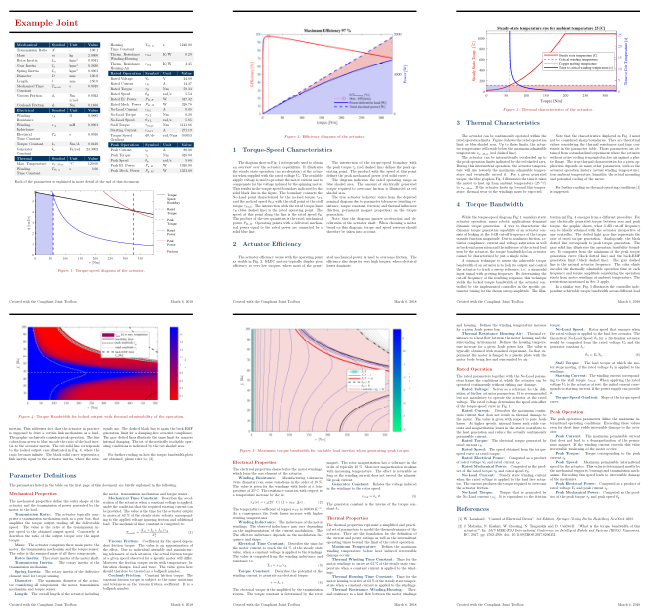
The datasheetGenerator class is instantiated for a given joint class and implements a public method interface to draw analysis plots illustrating torque-speed and efficiency diagrams, thermal characteristics as well as the
torque-bandwidth maps introduced in [4]. Provided, that a LaTeX installation is present on the user’s computer, the
datasheetGenerator class can assemble the above plots into a datasheet PDF file summarizing the properties of for
the respective actuator. For more details, an example explains the usage of the datasheetGenerator class.
The figure below depicts an example datasheet that has been generated with the Compliant Joint Toolbox.
A PDF file with this example datasheet can be examined following this link.