![]()
![]()
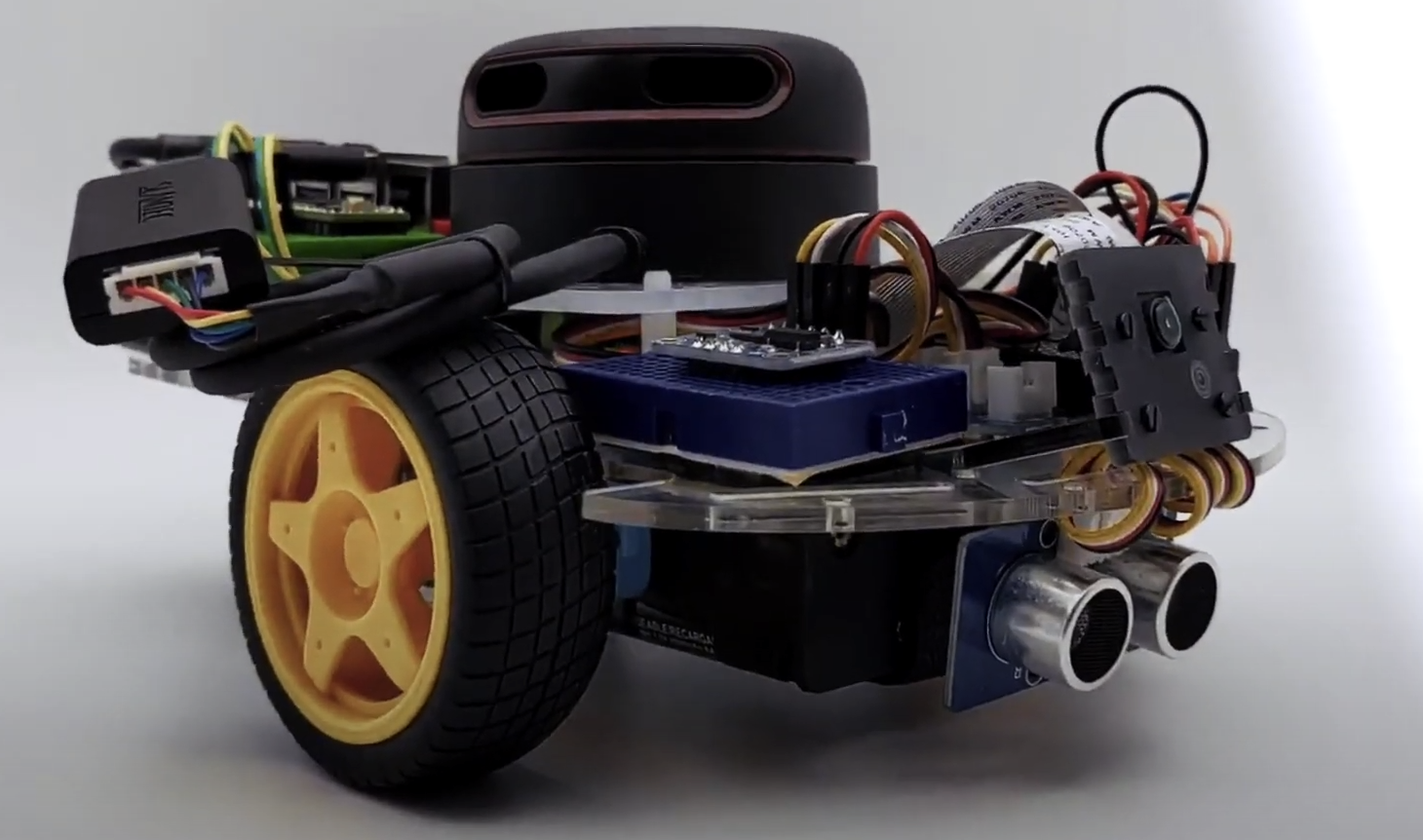
DiffBot is an autonomous differential drive robot with two wheels. Its main processing unit is a Raspberry Pi 4 B running Ubuntu Mate 20.04 and the ROS 1 (ROS Noetic) middleware. This respository contains ROS driver packages, ROS Control Hardware Interface for the real robot and configurations for simulating DiffBot. The formatted documentation can be found at: https://ros-mobile-robots.com.
| DiffBot | Lidar SLAMTEC RPLidar A2 |
|---|---|
 |
 |
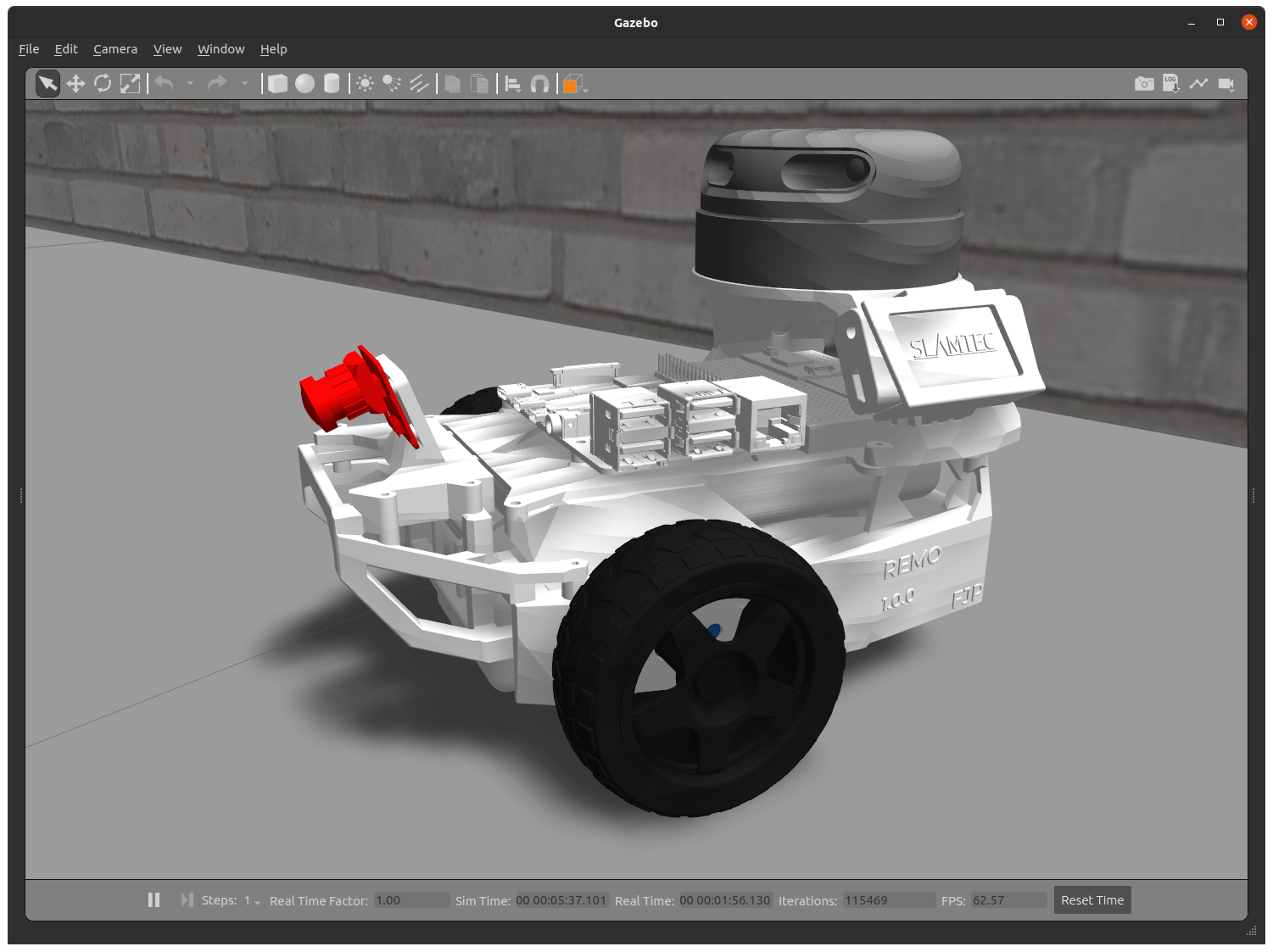
If you are looking for a 3D printable modular base, see the remo_description repository. You can use it directly with the software of this diffbot repository.
| Remo | Gazebo Simulation | RViz |
|---|---|---|
 |
 |
 |
It provides mounts for different camera modules, such as Raspi Cam v2, OAK-1, OAK-D and you can even design your own if you like. There is also support for different single board computers (Raspberry Pi and Nvidia Jetson Nano) through two changable decks. You are agin free to create your own.
| Real robot | Gazebo Simulation |
|---|---|
 |
  |
diffbot_base: ROS Control hardware interface includingcontroller_managercontrol loop for the real robot. Thescriptsfolder of this package contains the low-levelbase_controllerthat is running on the Teensy microcontroller.diffbot_bringup: Launch files to bring up the hardware drivers (camera, lidar, imu, ultrasonic, ...) for the real DiffBot robot.diffbot_control: Configurations for thediff_drive_controllerof ROS Control used in Gazebo simulation and the real robot.diffbot_description: URDF description of DiffBot including its sensors.diffbot_gazebo: Simulation specific launch and configuration files for DiffBot.diffbot_msgs: Message definitions specific to DiffBot, for example the message for encoder data.diffbot_navigation: Navigation based onmove_basepackage; launch and configuration files.diffbot_slam: Simultaneous localization and mapping using different implementations (e.g., gmapping) to create a map of the environment
The packages are written for and tested with ROS 1 Noetic on Ubuntu 20.04 Focal Fossa. For the real robot Ubuntu Mate 20.04 for arm64 is installed on the Raspberry Pi 4 B with 4GB. The communication between the mobile robot and the work pc is done by configuring the ROS Network, see also the documentation.
The required Ubuntu packages are listed in software package sections found in the documentation. Other ROS catkin packages such as rplidar_ros need to be cloned into the catkin workspace.
For an automated and simplified dependency installation process install the vcstool, which is used in the next steps.
sudo apt install python3-vcstoolTo build the packages in this repository including the Remo robot follow these steps:
-
cdinto an existing ROS Noetic catkin workspace or create a new one:mkdir -p catkin_ws/src -
Clone this repository in the
srcfolder of your ROS Noetic catkin workspace:cd catkin_ws/srcgit clone https://github.com/fjp/diffbot.git -
Execute the
vcs importcommand from the root of the catkin workspace and pipe in thediffbot_dev.reposorremo_robot.reposYAML file, depending on where you execute the command, either the development PC or the SBC of Remo to clone the listed dependencies. Run the following command only on your development machine:vcs import < src/diffbot/diffbot_dev.reposRun the next command on Remo robot's SBC:
vcs import < src/diffbot/remo_robot.repos -
Install the requried binary dependencies of all packages in the catkin workspace using the following
rosdepcommand:rosdep install --from-paths src --ignore-src -r -y -
After installing the required dependencies build the catkin workspace, either with
catkin_make:catkin_ws$ catkin_makeor using catkin-tools:
catkin_ws$ catkin build -
Finally, source the newly built packages with the
devel/setup.*script, depending on your used shell:For bash use:
catkin_ws$ source devel/setup.bashFor zsh use:
catkin_ws$ source devel/setup.zsh
The following sections describe how to run the robot simulation and how to make use of the real hardware using the available package launch files.
Control the robot inside Gazebo and view what it sees in RViz using the following launch file:
roslaunch diffbot_control diffbot.launchThis will launch the default diffbot world db_world.world.
To run the turtlebot3_world
make sure to download it to your ~/.gazebo/models/ folder, because the turtlebot3_world.world file references the turtlebot3_world model.
After that you can run it with the following command:
roslaunch diffbot_control diffbot.launch world_name:='$(find diffbot_gazebo)/worlds/turtlebot3_world.world'db_world.world |
turtlebot3_world.world |
|---|---|
 |
 |
To navigate the robot in the Gazebo simulator in db_world.world run the command:
roslaunch diffbot_navigation diffbot.launchThis uses a previously mapped map of db_world.world (found in diffbot_navigation/maps) that is served by
the map_server. With this you can use the 2D Nav Goal in RViz directly to let the robot drive autonomously in the db_world.world.

To run the turtlebot3_world.world (or your own stored world and map) use the same diffbot_navigation/launch/diffbot.launch file but change
the world_name and map_file arguments to your desired world and map yaml files:
roslaunch diffbot_navigation diffbot.launch world_name:='$(find diffbot_gazebo)/worlds/turtlebot3_world.world' map_file:='$(find diffbot_navigation)/maps/map.yaml'
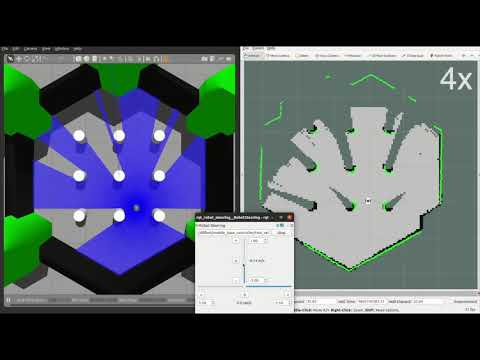
To map a new simulated environment using slam gmapping, first run
roslaunch diffbot_gazebo diffbot.launch world_name:='$(find diffbot_gazebo)/worlds/turtlebot3_world.world'and in a second terminal execute
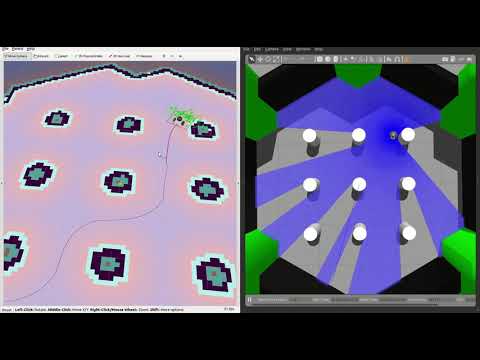
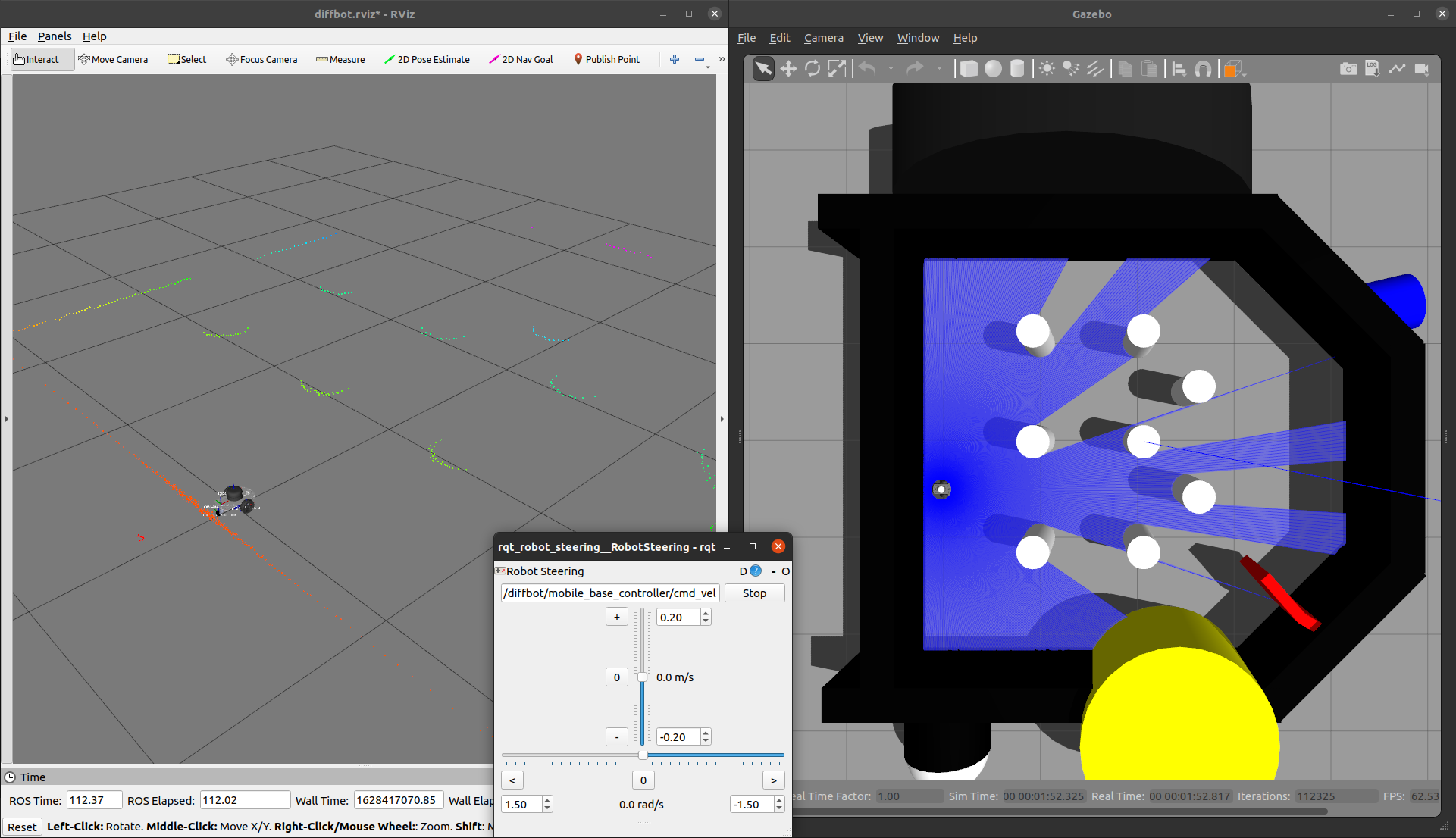
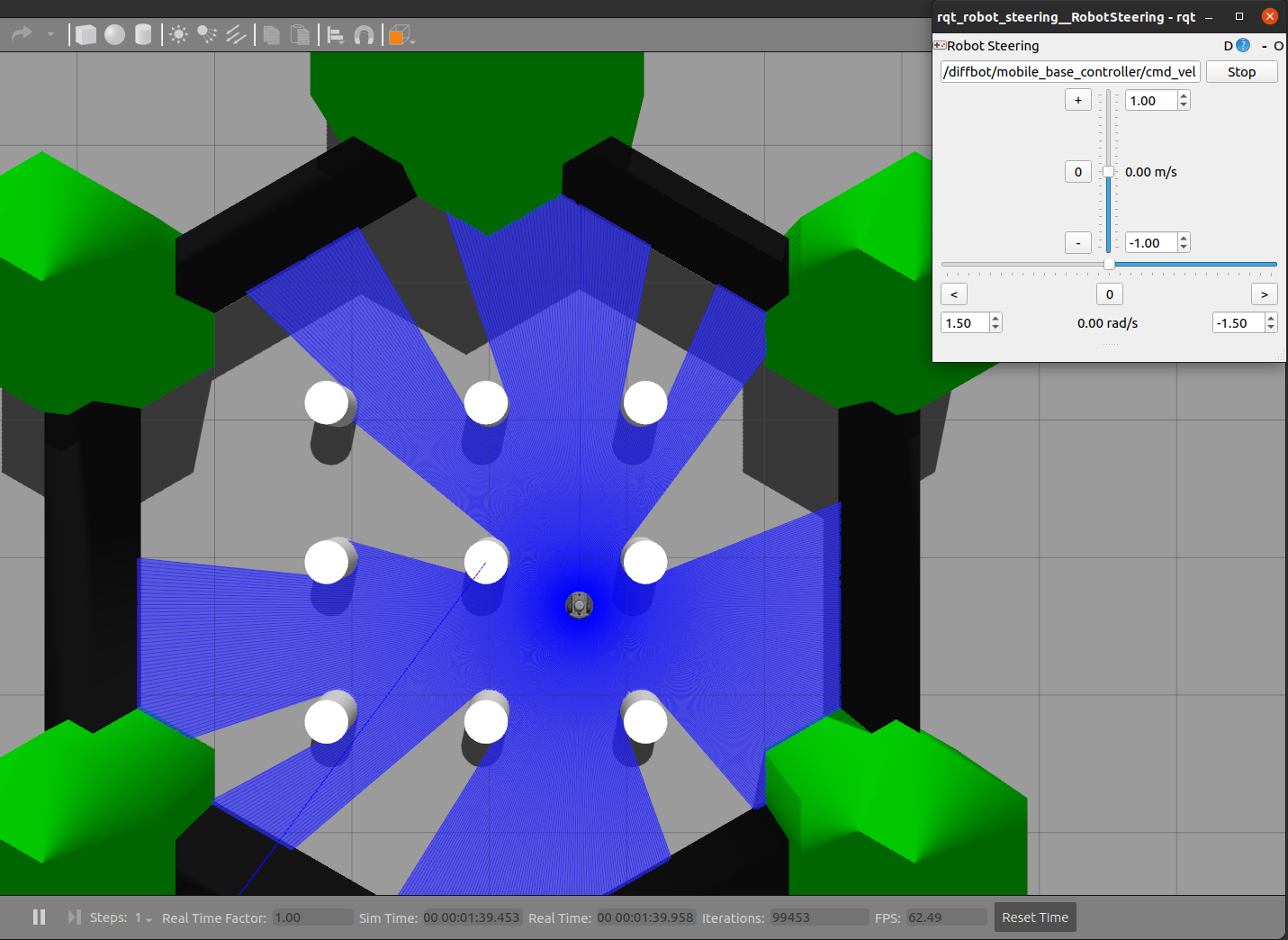
roslaunch diffbot_slam diffbot_slam.launch slam_method:=gmappingThen explore the world with the teleop_twist_keyboard or with the already launched rqt_robot_steering GUI plugin:
When you finished exploring the new world, use the map_saver node from the map_server package to store the mapped enviornment:
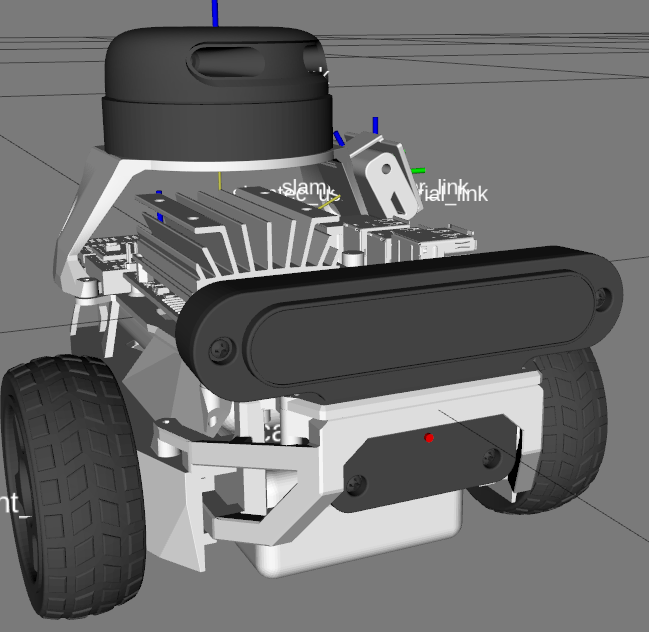
rosrun map_server map_saver -f ~/mapView just the diffbot_description in RViz.
roslaunch diffbot_description view_diffbot.launch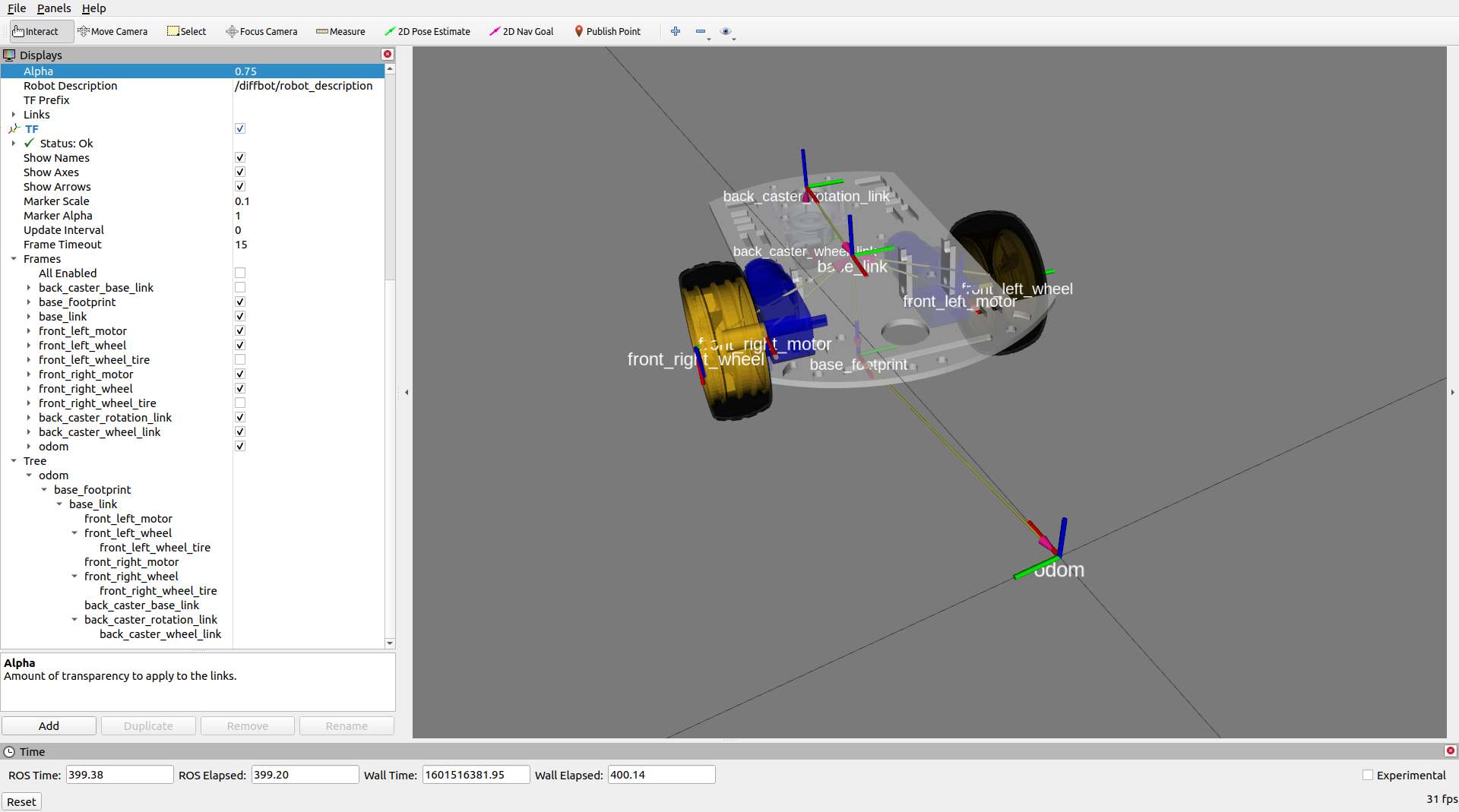
The following video shows how to map a new environment and navigate in it
Start by setting up the ROS Network, by making the development PC the rosmaster (set the ROS_MASTER_URI environment variable accordingly, see ROS Network Setup for more details),
Then follow the steps listed below to run the real Diffbot or Remo robot hardware:
-
First, brinup the robot hardware including its laser with the following launch file from the
diffbot_bringuppackage. Make sure to run this on the real robot (e.g. connect to it viassh):roslaunch diffbot_bringup bringup_with_laser.launch -
Then, in a new terminal on your remote/work development machine (not the single board computer) run the slam gmapping with the same command as in the simulation:
roslaunch diffbot_slam diffbot_slam.launch slam_method:=gmappingAs you can see in the video, this should open up RViz and the
rqt_robot_steeringplugin. -
Next, steer the robot around manually either using the
keyboard_teleopnode or using therqt_robot_steeringnode and save the map with the following command when you are done exploring:rosrun map_server map_saver -f office
After the mapping process it is possible to use the created map for navigation, after running the following launch files:
-
On the single board computer (e.g. Raspberry Pi) make sure that the following is launched:
roslaunch diffbot_bringup bringup_with_laser.launch -
Then on the work/remote development machine run the
diffbot_hw.lauchfrom thediffbot_navigationpackage:roslaunch diffbot_navigation diffbot_hw.lauchAmong other essential navigation and map server nodes, this will also launch an instance of RViz on your work pc where you can use its tools to:
- Localize the robot with the "2D Pose Estimate" tool (green arrow) in RViz
- Use the "2D Nav Goal" tool in RViz (red arrow) to send goals to the robot
Contributions to these tasks are welcome, see also the contribution section below.
- Migrate from ROS 1 to ROS 2
- Add
diffbot_driverpackage for ultrasonic ranger, imu and motor driver node code. - Make use of the imu odometry data to improve the encoder odometry using a Kalman filter, such as
robot_localization(or the less activerobot_pose_ekf). - The current implementation of the ROS Control
hardware_interface::RobotHWuses a high level PID controller. This is working but also test a low level PID on the Teensy 3.2 mcu using the Arduino library of the Grove i2c motor driver. -> This is partly implemented (seediffbot_base/scripts/base_controller) Also replaceWire.hwith the improvedi2c_t3library.
- Test different global and local planners and add documentation
- Add
diffbot_mbfpackage usingmove_base_flex, the improved version ofmove_base.
To enable object detection or semantic segmentation with the RPi Camera the Raspberry Pi 4 B will be upated with a Google Coral USB Accelerator. Possible useful packages:

- Use the generic
teleop_twist_keyboardand/orteleop_twist_joypackage to drive the real robot and in simulation. - Playstation controller
- Use clang format together with
.clang-formatfile forroscppto comply with ROS C++ Style Guidelines
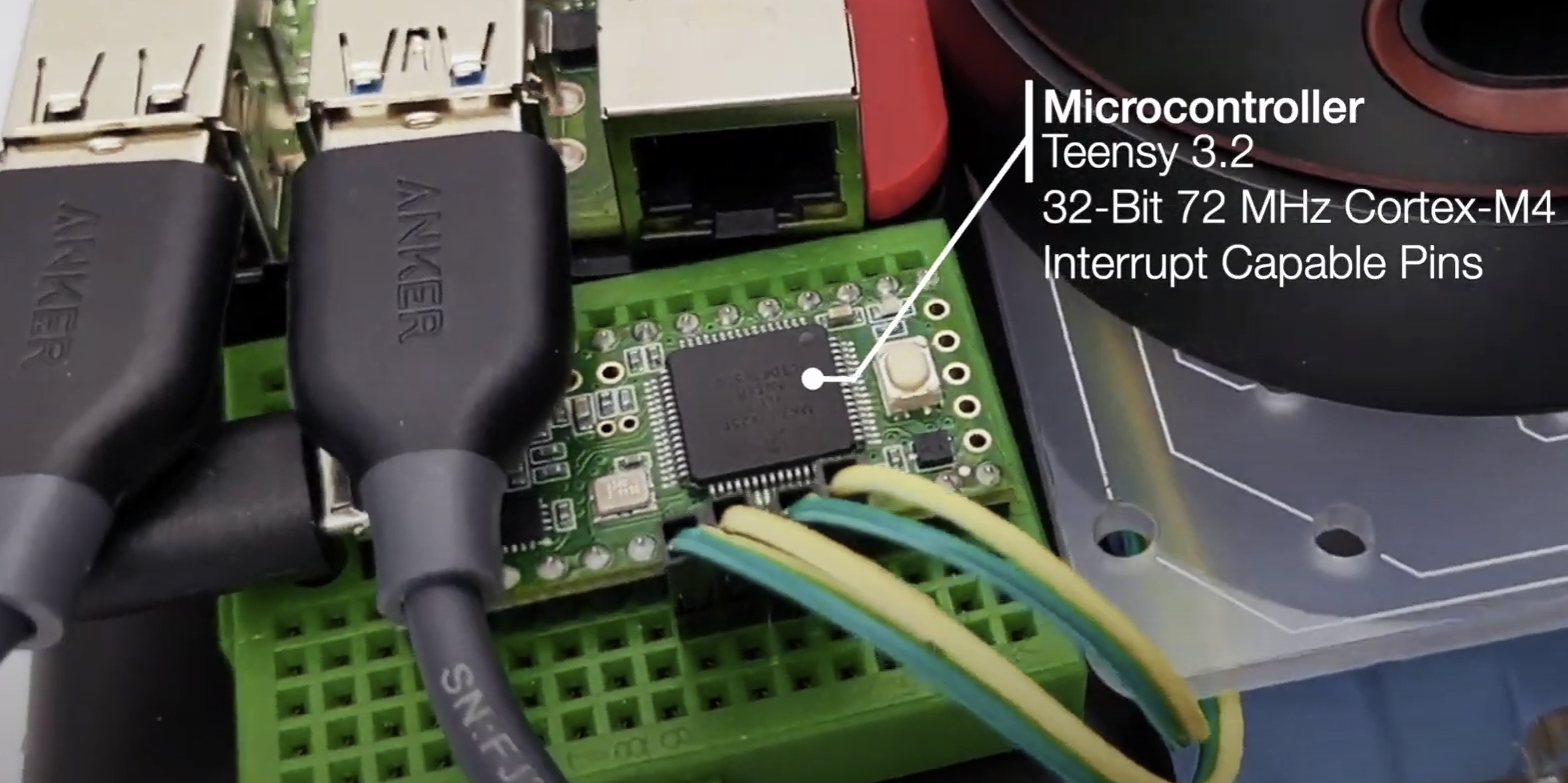
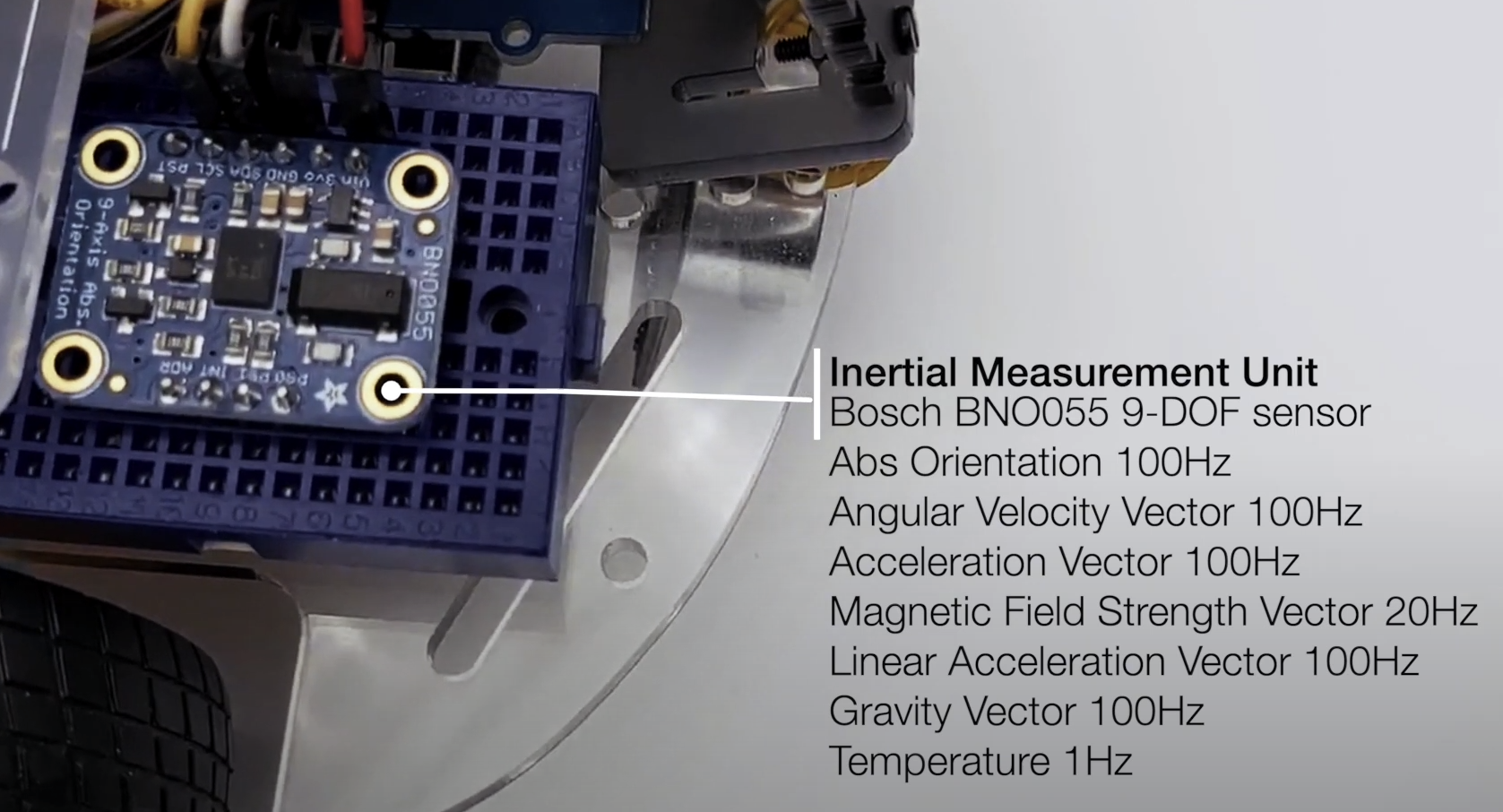
| SBC RPi 4B | MCU Teensy 3.2 | IMU Bosch |
|---|---|---|
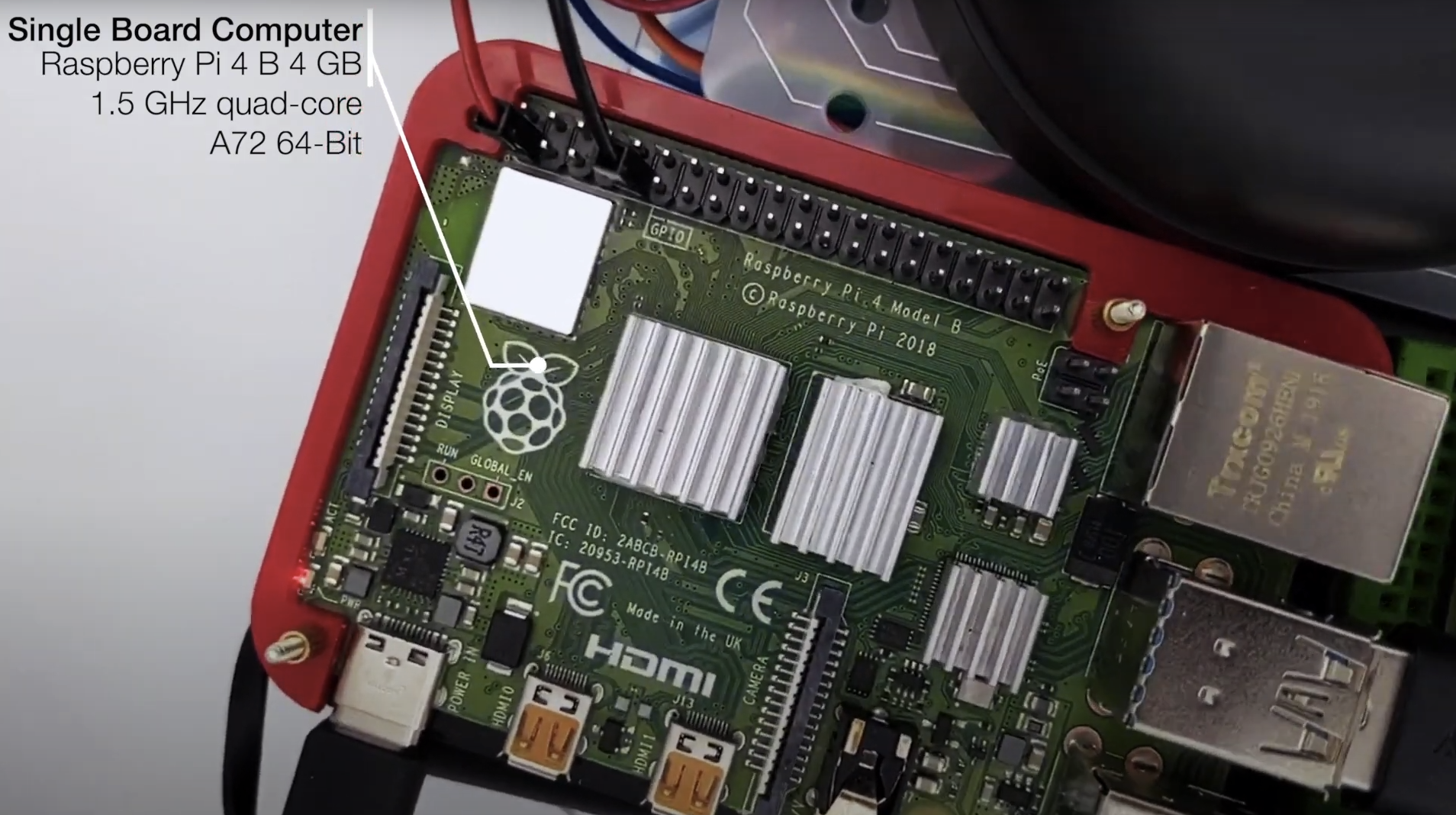 |
 |
 |
| Part | Store |
|---|---|
| Raspberry Pi 4 B (4 Gb) | Amazon.com, Amazon.de |
| SanDisk 64 GB SD Card Class 10 | Amazon.com, Amazon.de |
| Robot Smart Chassis Kit | Amazon.com, Amazon.de |
| SLAMTEC RPLidar A2M8 (12 m) | Amazon.com, Amazon.de |
| Grove Ultrasonic Ranger | Amazon.com, Amazon.de |
| Raspi Camera Module V2, 8 MP, 1080p | Amazon.com, Amazon.de |
| Grove Motor Driver | seeedstudio.com, Amazon.de |
| I2C Hub | seeedstudio.com, Amazon.de |
| Teensy 4.0 or 3.2 | PJRC Teensy 4.0, PJRC Teensy 3.2 |
| Hobby Motor with Encoder - Metal Gear (DG01D-E) | Sparkfun |
| Part | Store |
|---|---|
| Raspberry Pi 4 B (4 Gb) | Amazon.com, Amazon.de |
| SanDisk 64 GB SD Card Class 10 | Amazon.com, Amazon.de |
| Remo Base | 3D printable, see remo_description |
| SLAMTEC RPLidar A2M8 (12 m) | Amazon.com, Amazon.de |
| Raspi Camera Module V2, 8 MP, 1080p | Amazon.com, Amazon.de |
| Adafruit DC Motor (+ Stepper) FeatherWing | adafruit.com, Amazon.de |
| Teensy 4.0 or 3.2 | PJRC Teensy 4.0, PJRC Teensy 3.2 |
| Hobby Motor with Encoder - Metal Gear (DG01D-E) | Sparkfun |
| Powerbank (e.g 15000 mAh) | Amazon.de This Powerbank from Goobay is close to the maximum possible size LxWxH: 135.5x70x18 mm) |
| Battery pack (for four or eight batteries) | Amazon.de |
| Part | Store |
|---|---|
| PicoScope 3000 Series Oscilloscope 2CH | Amazon.de |
| VOLTCRAFT PPS-16005 | Amazon.de |
| 3D Printer for Remo's parts | Prusa, Ultimaker, etc. or use a local print service or an online one such as Sculpteo |
DiffBot

Remo

- Louis Morandy-Rapiné for his great work on REMO robot and designing it in Fusion 360.
- Lentin Joseph and the participants of ROS Developer Learning Path
- The configurable
diffbot_descriptionusing yaml files (see ROS Wiki on xacro) is part ofmobile_robot_descriptionfrom @pxalcantara. - Thanks to @NestorDP for help with the meshes (similar to
littlebot), see also issue #1 dfki-ric/mir_roboteborghi10/my_ROS_mobile_robothusky- turtlebot3
- Linorobot
Your contributions are most welcome. These can be in the form of raising issues, creating PRs to correct or add documentation and of course solving existing issues or adding new features.
diffbot is licenses under the BSD 3-Clause.
See also open-source-license-acknowledgements-and-third-party-copyrights.md.
The documentation is licensed differently,
visit its license text to learn more.