forked from open-mmlab/mmsegmentation
-
Notifications
You must be signed in to change notification settings - Fork 0
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
[Feature] Support depth metrics (open-mmlab#3297)
Thanks for your contribution and we appreciate it a lot. The following
instructions would make your pull request more healthy and more easily
get feedback. If you do not understand some items, don't worry, just
make the pull request and seek help from maintainers.
## Motivation
Please describe the motivation of this PR and the goal you want to
achieve through this PR.
Support metrics for the depth estimation task, including RMSE, ABSRel,
and etc.
## Modification
Please briefly describe what modification is made in this PR.
## BC-breaking (Optional)
Does the modification introduce changes that break the
backward-compatibility of the downstream repos?
If so, please describe how it breaks the compatibility and how the
downstream projects should modify their code to keep compatibility with
this PR.
## Use cases (Optional)
Using the following configuration to compute depth metrics on NYU
```python
dataset_type = 'NYUDataset'
data_root = 'data/nyu'
test_pipeline = [
dict(type='LoadImageFromFile'),
dict(dict(type='LoadDepthAnnotation', depth_rescale_factor=1e-3)),
dict(
type='PackSegInputs',
meta_keys=('img_path', 'depth_map_path', 'ori_shape', 'img_shape',
'pad_shape', 'scale_factor', 'flip', 'flip_direction',
'category_id'))
]
val_dataloader = dict(
batch_size=1,
num_workers=4,
persistent_workers=True,
sampler=dict(type='DefaultSampler', shuffle=False),
dataset=dict(
type=dataset_type,
data_root=data_root,
test_mode=True,
data_prefix=dict(
img_path='images/test', depth_map_path='annotations/test'),
pipeline=test_pipeline))
test_dataloader = val_dataloader
val_evaluator = dict(type='DepthMetric', max_depth_eval=10.0, crop_type='nyu')
test_evaluator = val_evaluator
```
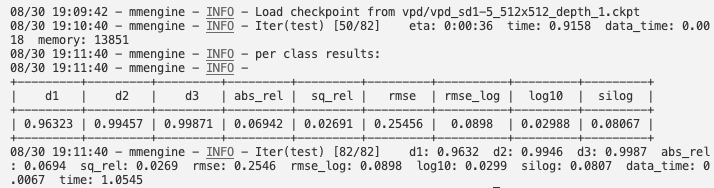
Example log:
## Checklist
1. Pre-commit or other linting tools are used to fix the potential lint
issues.
2. The modification is covered by complete unit tests. If not, please
add more unit test to ensure the correctness.
3. If the modification has potential influence on downstream projects,
this PR should be tested with downstream projects, like MMDet or
MMDet3D.
4. The documentation has been modified accordingly, like docstring or
example tutorials.- Loading branch information
Showing
5 changed files
with
303 additions
and
5 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,4 +1,4 @@ | ||
| # Copyright (c) OpenMMLab. All rights reserved. | ||
| from .metrics import CityscapesMetric, IoUMetric | ||
| from .metrics import CityscapesMetric, DepthMetric, IoUMetric | ||
|
|
||
| __all__ = ['IoUMetric', 'CityscapesMetric'] | ||
| __all__ = ['IoUMetric', 'CityscapesMetric', 'DepthMetric'] |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,5 +1,6 @@ | ||
| # Copyright (c) OpenMMLab. All rights reserved. | ||
| from .citys_metric import CityscapesMetric | ||
| from .depth_metric import DepthMetric | ||
| from .iou_metric import IoUMetric | ||
|
|
||
| __all__ = ['IoUMetric', 'CityscapesMetric'] | ||
| __all__ = ['IoUMetric', 'CityscapesMetric', 'DepthMetric'] |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,212 @@ | ||
| # Copyright (c) OpenMMLab. All rights reserved. | ||
| import os.path as osp | ||
| from collections import OrderedDict, defaultdict | ||
| from typing import Dict, List, Optional, Sequence | ||
|
|
||
| import cv2 | ||
| import numpy as np | ||
| import torch | ||
| from mmengine.dist import is_main_process | ||
| from mmengine.evaluator import BaseMetric | ||
| from mmengine.logging import MMLogger, print_log | ||
| from mmengine.utils import mkdir_or_exist | ||
| from prettytable import PrettyTable | ||
| from torch import Tensor | ||
|
|
||
| from mmseg.registry import METRICS | ||
|
|
||
|
|
||
| @METRICS.register_module() | ||
| class DepthMetric(BaseMetric): | ||
| """Depth estimation evaluation metric. | ||
| Args: | ||
| depth_metrics (List[str], optional): List of metrics to compute. If | ||
| not specified, defaults to all metrics in self.METRICS. | ||
| min_depth_eval (float): Minimum depth value for evaluation. | ||
| Defaults to 0.0. | ||
| max_depth_eval (float): Maximum depth value for evaluation. | ||
| Defaults to infinity. | ||
| crop_type (str, optional): Specifies the type of cropping to be used | ||
| during evaluation. This option can affect how the evaluation mask | ||
| is generated. Currently, 'nyu_crop' is supported, but other | ||
| types can be added in future. Defaults to None if no cropping | ||
| should be applied. | ||
| depth_scale_factor (float): Factor to scale the depth values. | ||
| Defaults to 1.0. | ||
| collect_device (str): Device name used for collecting results from | ||
| different ranks during distributed training. Must be 'cpu' or | ||
| 'gpu'. Defaults to 'cpu'. | ||
| output_dir (str): The directory for output prediction. Defaults to | ||
| None. | ||
| format_only (bool): Only format result for results commit without | ||
| perform evaluation. It is useful when you want to save the result | ||
| to a specific format and submit it to the test server. | ||
| Defaults to False. | ||
| prefix (str, optional): The prefix that will be added in the metric | ||
| names to disambiguate homonymous metrics of different evaluators. | ||
| If prefix is not provided in the argument, self.default_prefix | ||
| will be used instead. Defaults to None. | ||
| """ | ||
| METRICS = ('d1', 'd2', 'd3', 'abs_rel', 'sq_rel', 'rmse', 'rmse_log', | ||
| 'log10', 'silog') | ||
|
|
||
| def __init__(self, | ||
| depth_metrics: Optional[List[str]] = None, | ||
| min_depth_eval: float = 0.0, | ||
| max_depth_eval: float = float('inf'), | ||
| crop_type: Optional[str] = None, | ||
| depth_scale_factor: float = 1.0, | ||
| collect_device: str = 'cpu', | ||
| output_dir: Optional[str] = None, | ||
| format_only: bool = False, | ||
| prefix: Optional[str] = None, | ||
| **kwargs) -> None: | ||
| super().__init__(collect_device=collect_device, prefix=prefix) | ||
|
|
||
| if depth_metrics is None: | ||
| self.metrics = self.METRICS | ||
| elif isinstance(depth_metrics, [tuple, list]): | ||
| for metric in depth_metrics: | ||
| assert metric in self.METRICS, f'the metric {metric} is not ' \ | ||
| f'supported. Please use metrics in {self.METRICS}' | ||
| self.metrics = depth_metrics | ||
|
|
||
| # Validate crop_type, if provided | ||
| assert crop_type in [ | ||
| None, 'nyu_crop' | ||
| ], (f'Invalid value for crop_type: {crop_type}. Supported values are ' | ||
| 'None or \'nyu_crop\'.') | ||
| self.crop_type = crop_type | ||
| self.min_depth_eval = min_depth_eval | ||
| self.max_depth_eval = max_depth_eval | ||
| self.output_dir = output_dir | ||
| if self.output_dir and is_main_process(): | ||
| mkdir_or_exist(self.output_dir) | ||
| self.format_only = format_only | ||
| self.depth_scale_factor = depth_scale_factor | ||
|
|
||
| def process(self, data_batch: dict, data_samples: Sequence[dict]) -> None: | ||
| """Process one batch of data and data_samples. | ||
| The processed results should be stored in ``self.results``, which will | ||
| be used to compute the metrics when all batches have been processed. | ||
| Args: | ||
| data_batch (dict): A batch of data from the dataloader. | ||
| data_samples (Sequence[dict]): A batch of outputs from the model. | ||
| """ | ||
| for data_sample in data_samples: | ||
| pred_label = data_sample['pred_depth_map']['data'].squeeze() | ||
| # format_only always for test dataset without ground truth | ||
| if not self.format_only: | ||
| gt_depth = data_sample['gt_depth_map']['data'].squeeze().to( | ||
| pred_label) | ||
|
|
||
| eval_mask = self._get_eval_mask(gt_depth) | ||
| self.results.append( | ||
| (gt_depth[eval_mask], pred_label[eval_mask])) | ||
| # format_result | ||
| if self.output_dir is not None: | ||
| basename = osp.splitext(osp.basename( | ||
| data_sample['img_path']))[0] | ||
| png_filename = osp.abspath( | ||
| osp.join(self.output_dir, f'{basename}.png')) | ||
| output_mask = pred_label.cpu().numpy( | ||
| ) * self.depth_scale_factor | ||
|
|
||
| cv2.imwrite(png_filename, output_mask.astype(np.uint16), | ||
| [cv2.IMWRITE_PNG_COMPRESSION, 0]) | ||
|
|
||
| def _get_eval_mask(self, gt_depth: Tensor): | ||
| """Generates an evaluation mask based on ground truth depth and | ||
| cropping. | ||
| Args: | ||
| gt_depth (Tensor): Ground truth depth map. | ||
| Returns: | ||
| Tensor: Boolean mask where evaluation should be performed. | ||
| """ | ||
| valid_mask = torch.logical_and(gt_depth > self.min_depth_eval, | ||
| gt_depth < self.max_depth_eval) | ||
|
|
||
| if self.crop_type == 'nyu_crop': | ||
| # this implementation is adapted from | ||
| # https://github.com/zhyever/Monocular-Depth-Estimation-Toolbox/blob/main/depth/datasets/nyu.py # noqa | ||
| crop_mask = torch.zeros_like(valid_mask) | ||
| crop_mask[45:471, 41:601] = 1 | ||
| else: | ||
| crop_mask = torch.ones_like(valid_mask) | ||
|
|
||
| eval_mask = torch.logical_and(valid_mask, crop_mask) | ||
| return eval_mask | ||
|
|
||
| @staticmethod | ||
| def _calc_all_metrics(gt_depth, pred_depth): | ||
| """Computes final evaluation metrics based on accumulated results.""" | ||
| assert gt_depth.shape == pred_depth.shape | ||
|
|
||
| thresh = torch.max((gt_depth / pred_depth), (pred_depth / gt_depth)) | ||
| diff = pred_depth - gt_depth | ||
| diff_log = torch.log(pred_depth) - torch.log(gt_depth) | ||
|
|
||
| d1 = torch.sum(thresh < 1.25).float() / len(thresh) | ||
| d2 = torch.sum(thresh < 1.25**2).float() / len(thresh) | ||
| d3 = torch.sum(thresh < 1.25**3).float() / len(thresh) | ||
|
|
||
| abs_rel = torch.mean(torch.abs(diff) / gt_depth) | ||
| sq_rel = torch.mean(torch.pow(diff, 2) / gt_depth) | ||
|
|
||
| rmse = torch.sqrt(torch.mean(torch.pow(diff, 2))) | ||
| rmse_log = torch.sqrt(torch.mean(torch.pow(diff_log, 2))) | ||
|
|
||
| log10 = torch.mean( | ||
| torch.abs(torch.log10(pred_depth) - torch.log10(gt_depth))) | ||
| silog = torch.sqrt( | ||
| torch.pow(diff_log, 2).mean() - | ||
| 0.5 * torch.pow(diff_log.mean(), 2)) | ||
|
|
||
| return { | ||
| 'd1': d1.item(), | ||
| 'd2': d2.item(), | ||
| 'd3': d3.item(), | ||
| 'abs_rel': abs_rel.item(), | ||
| 'sq_rel': sq_rel.item(), | ||
| 'rmse': rmse.item(), | ||
| 'rmse_log': rmse_log.item(), | ||
| 'log10': log10.item(), | ||
| 'silog': silog.item() | ||
| } | ||
|
|
||
| def compute_metrics(self, results: list) -> Dict[str, float]: | ||
| """Compute the metrics from processed results. | ||
| Args: | ||
| results (list): The processed results of each batch. | ||
| Returns: | ||
| Dict[str, float]: The computed metrics. The keys are the names of | ||
| the metrics, and the values are corresponding results. The keys | ||
| are identical with self.metrics. | ||
| """ | ||
| logger: MMLogger = MMLogger.get_current_instance() | ||
| if self.format_only: | ||
| logger.info(f'results are saved to {osp.dirname(self.output_dir)}') | ||
| return OrderedDict() | ||
|
|
||
| metrics = defaultdict(list) | ||
| for gt_depth, pred_depth in results: | ||
| for key, value in self._calc_all_metrics(gt_depth, | ||
| pred_depth).items(): | ||
| metrics[key].append(value) | ||
| metrics = {k: sum(metrics[k]) / len(metrics[k]) for k in self.metrics} | ||
|
|
||
| table_data = PrettyTable() | ||
| for key, val in metrics.items(): | ||
| table_data.add_column(key, [round(val, 5)]) | ||
|
|
||
| print_log('results:', logger) | ||
| print_log('\n' + table_data.get_string(), logger=logger) | ||
|
|
||
| return metrics |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,85 @@ | ||
| # Copyright (c) OpenMMLab. All rights reserved. | ||
| import os.path as osp | ||
| import shutil | ||
| from unittest import TestCase | ||
|
|
||
| import torch | ||
| from mmengine.structures import PixelData | ||
|
|
||
| from mmseg.evaluation import DepthMetric | ||
| from mmseg.structures import SegDataSample | ||
|
|
||
|
|
||
| class TestDepthMetric(TestCase): | ||
|
|
||
| def _demo_mm_inputs(self, | ||
| batch_size=2, | ||
| image_shapes=(3, 64, 64), | ||
| num_classes=5): | ||
| """Create a superset of inputs needed to run test or train batches. | ||
| Args: | ||
| batch_size (int): batch size. Default to 2. | ||
| image_shapes (List[tuple], Optional): image shape. | ||
| Default to (3, 64, 64) | ||
| num_classes (int): number of different classes. | ||
| Default to 5. | ||
| """ | ||
| if isinstance(image_shapes, list): | ||
| assert len(image_shapes) == batch_size | ||
| else: | ||
| image_shapes = [image_shapes] * batch_size | ||
|
|
||
| data_samples = [] | ||
| for idx in range(batch_size): | ||
| image_shape = image_shapes[idx] | ||
| _, h, w = image_shape | ||
|
|
||
| data_sample = SegDataSample() | ||
| gt_depth_map = torch.rand((1, h, w)) * 10 | ||
| data_sample.gt_depth_map = PixelData(data=gt_depth_map) | ||
|
|
||
| data_samples.append(data_sample.to_dict()) | ||
|
|
||
| return data_samples | ||
|
|
||
| def _demo_mm_model_output(self, | ||
| data_samples, | ||
| batch_size=2, | ||
| image_shapes=(3, 64, 64), | ||
| num_classes=5): | ||
|
|
||
| _, h, w = image_shapes | ||
|
|
||
| for data_sample in data_samples: | ||
| data_sample['pred_depth_map'] = dict(data=torch.randn(1, h, w)) | ||
|
|
||
| data_sample[ | ||
| 'img_path'] = 'tests/data/pseudo_dataset/imgs/00000_img.jpg' | ||
| return data_samples | ||
|
|
||
| def test_evaluate(self): | ||
| """Test using the metric in the same way as Evalutor.""" | ||
|
|
||
| data_samples = self._demo_mm_inputs() | ||
| data_samples = self._demo_mm_model_output(data_samples) | ||
|
|
||
| depth_metric = DepthMetric() | ||
| depth_metric.process([0] * len(data_samples), data_samples) | ||
| res = depth_metric.compute_metrics(depth_metric.results) | ||
| self.assertIsInstance(res, dict) | ||
|
|
||
| # test save depth map file in output_dir | ||
| depth_metric = DepthMetric(output_dir='tmp') | ||
| depth_metric.process([0] * len(data_samples), data_samples) | ||
| assert osp.exists('tmp') | ||
| assert osp.isfile('tmp/00000_img.png') | ||
| shutil.rmtree('tmp') | ||
|
|
||
| # test format_only | ||
| depth_metric = DepthMetric(output_dir='tmp', format_only=True) | ||
| depth_metric.process([0] * len(data_samples), data_samples) | ||
| assert depth_metric.results == [] | ||
| assert osp.exists('tmp') | ||
| assert osp.isfile('tmp/00000_img.png') | ||
| shutil.rmtree('tmp') |