

cilantro is a lean and fast C++ library for working with point cloud data, with emphasis given to the 3D case.
It includes efficient implementations for a variety of common operations, providing a clean API and attempting to minimize the amount of boilerplate code.
The library is extensively templated, enabling operations on data of arbitrary numerical type and dimensionality (where applicable) and featuring a modular/extensible design of the more complex procedures.
At the same time, convenience aliases/wrappers for the most common cases are provided.
A high-level description of cilantro can be found in our technical report.
- General dimension kd-trees (using bundled nanoflann)
- Surface normal and curvature (robust) estimation from raw point clouds
- General dimension grid-based point cloud resampling
- Principal Component Analysis
- Basic I/O utilities for 3D point clouds (in PLY format, using bundled tinyply) and Eigen matrices
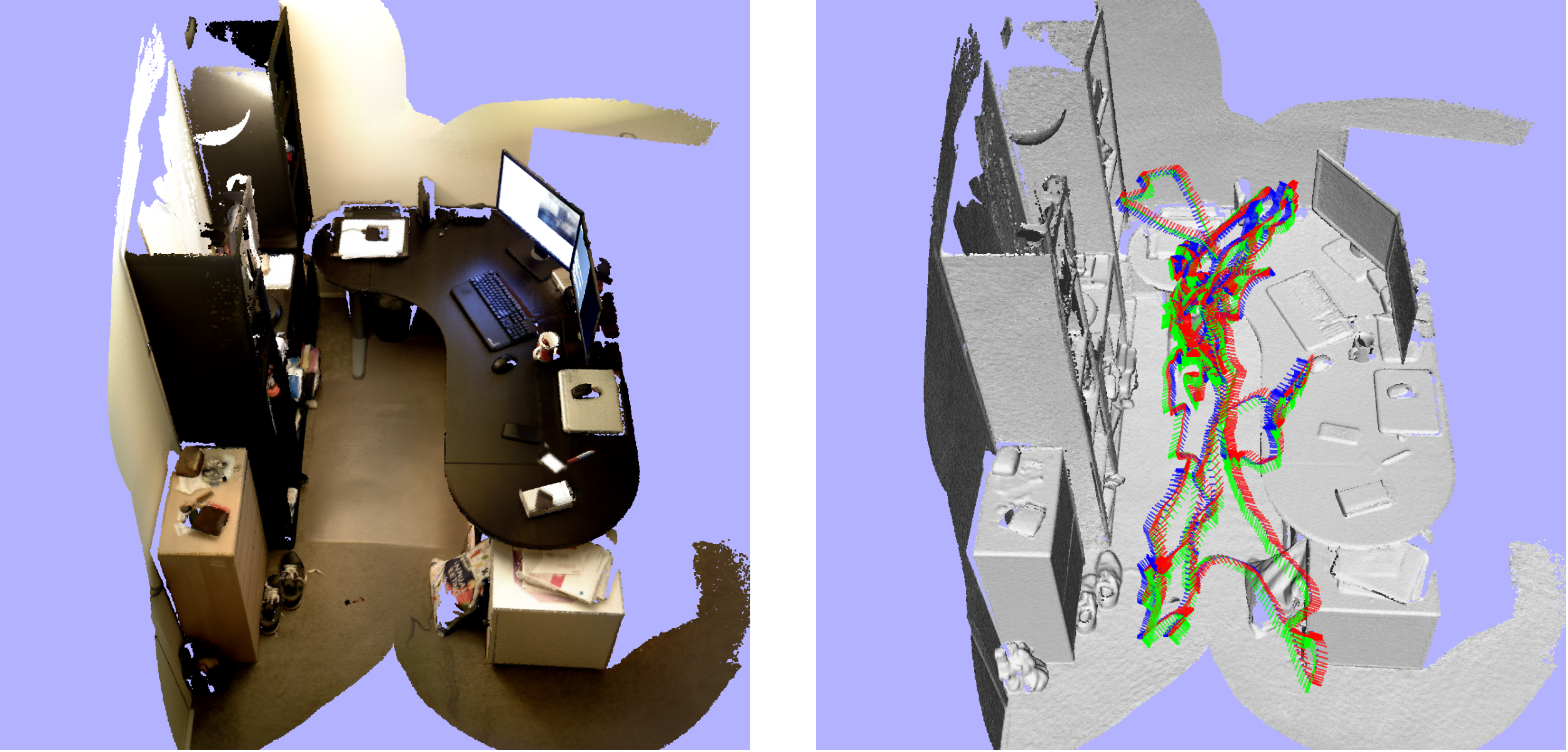
- RGBD image pair to/from point cloud conversion utilities
- A general dimension convex polytope representation that is computed (using bundled Qhull) from either vertex or half-space intersection input and allows for easy switching between the respective representations
- A representation of generic (general dimension) space regions as unions of convex polytopes that implements set operations

- General dimension k-means clustering that supports all distance metrics supported by nanoflann
- Spectral clustering based on various graph Laplacian types (using bundled Spectra)
- Mean-shift clustering with custom kernel support
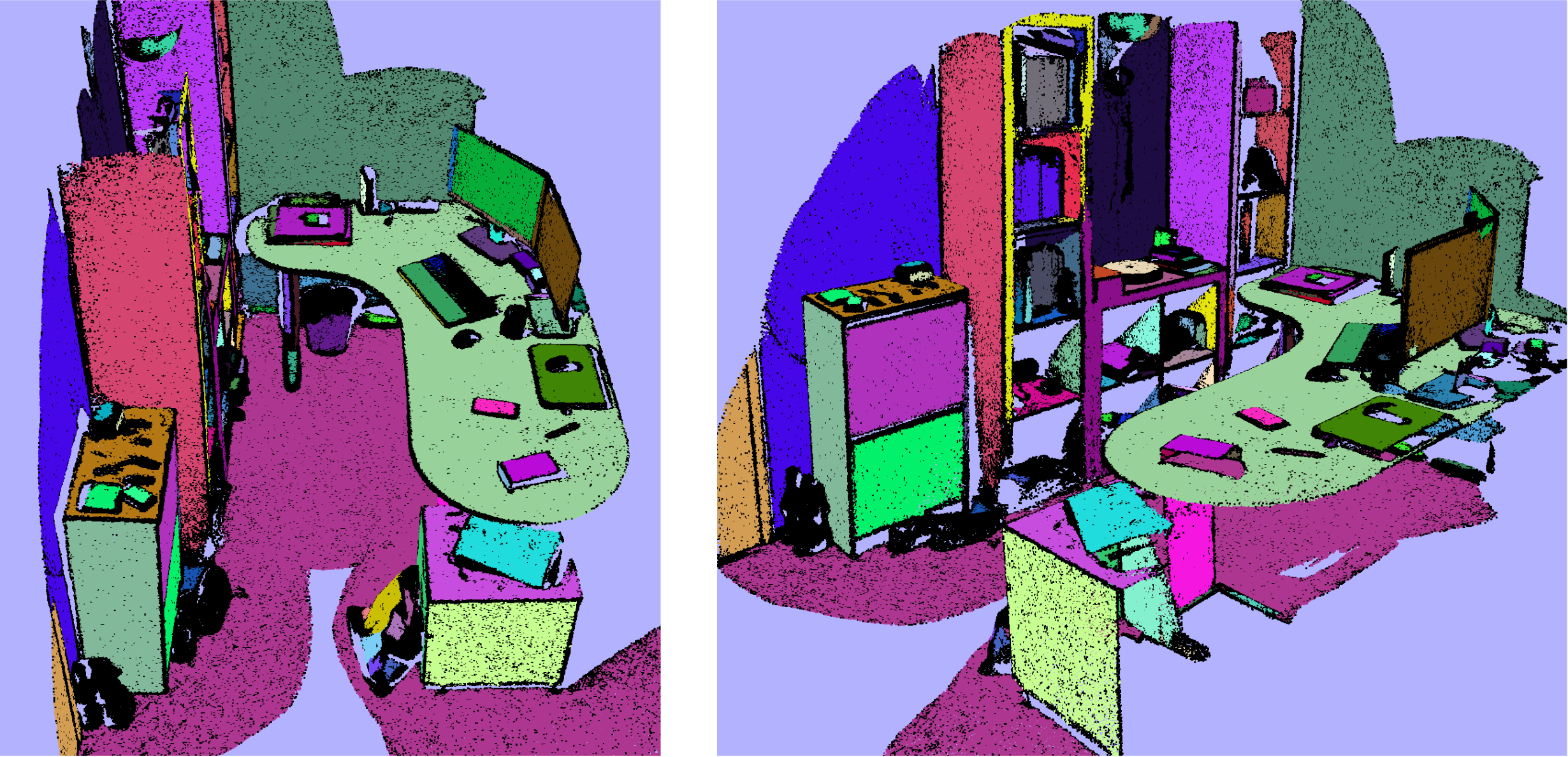
- Connected component based point cloud segmentation that supports arbitrary point-wise similarity functions
- Multiple generic Iterative Closest Point implementations that support arbitrary correspondence search methods in arbitrary point feature spaces for:
- Rigid or affine alignment under the point-to-point metric (general dimension), point-to-plane metric (2D or 3D), or any combination thereof
- Non-rigid alignment of 2D or 3D point sets, by means of a robustly regularized, locally-rigid or locally-affine deformation field, under any combination of the point-to-point and point-to-plane metrics; implementations for both densely and sparsely (by means of an Embedded Deformation Graph) supported warp fields are provided

- A RANSAC estimator template and instantiations thereof for general dimension:
- Robust hyperplane estimation
- Rigid point cloud registration given noisy correspondences
- Classical Multidimensional Scaling (using bundled Spectra for eigendecompositions)
- A powerful, extensible, and easy to use 3D visualizer
- Eigen (version 3.3 or newer) [required]
- Pangolin (built with Eigen enabled) [optional; needed for visualization modules and most examples]
cilantro is developed and tested on Ubuntu variants (18.04 and newer) using CMake.
To clone and build the library (with bundled examples), execute the following in a terminal:
git clone https://github.com/kzampog/cilantro.git
cd cilantro
mkdir build
cd build
cmake ..
make -jDocumentation (readthedocs.io, Doxygen API reference) is a work in progress.
The short provided examples (built by default) cover a significant part of the library's functionality.
Most of them expect a single command-line argument (path to a point cloud file in PLY format).
One such input is bundled in examples/test_clouds for quick testing.
The library is released under the MIT license.
If you use cilantro in your research, please cite our technical report:
@inproceedings{zampogiannis2018cilantro,
author = {Zampogiannis, Konstantinos and Fermuller, Cornelia and Aloimonos, Yiannis},
title = {cilantro: A Lean, Versatile, and Efficient Library for Point Cloud Data Processing},
booktitle = {Proceedings of the 26th ACM International Conference on Multimedia},
series = {MM '18},
year = {2018},
isbn = {978-1-4503-5665-7},
location = {Seoul, Republic of Korea},
pages = {1364--1367},
doi = {10.1145/3240508.3243655},
publisher = {ACM},
address = {New York, NY, USA}
}