🌍 Chinese supported mandarin and tested with multiple datasets: aidatatang_200zh, magicdata, aishell3, data_aishell, and etc.
🤩 PyTorch worked for pytorch, tested in version of 1.9.0(latest in August 2021), with GPU Tesla T4 and GTX 2060
🌍 Windows + Linux run in both Windows OS and linux OS (even in M1 MACOS)
🤩 Easy & Awesome effect with only newly-trained synthesizer, by reusing the pretrained encoder/vocoder
🌍 Webserver Ready to serve your result with remote calling
Follow the original repo to test if you got all environment ready. **Python 3.7 or higher ** is needed to run the toolbox.
- Install PyTorch.
If you get an
ERROR: Could not find a version that satisfies the requirement torch==1.9.0+cu102 (from versions: 0.1.2, 0.1.2.post1, 0.1.2.post2 )This error is probably due to a low version of python, try using 3.9 and it will install successfully
- Install ffmpeg.
- Run
pip install -r requirements.txtto install the remaining necessary packages. - Install webrtcvad
pip install webrtcvad-wheels(If you need)
or
-
install dependencies with
condaormambaconda env create -n env_name -f env.ymlmamba env create -n env_name -f env.ymlwill create a virtual environment where necessary dependencies are installed. Switch to the new environment by
conda activate env_nameand enjoy it.env.yml only includes the necessary dependencies to run the project,temporarily without monotonic-align. You can check the official website to install the GPU version of pytorch.
The following steps are a workaround to directly use the original
demo_toolbox.pywithout the changing of codes.Since the major issue comes with the PyQt5 packages used in
demo_toolbox.pynot compatible with M1 chips, were one to attempt on training models with the M1 chip, either that person can forgodemo_toolbox.py, or one can try theweb.pyin the project.
1.2.1 Install PyQt5, with ref here.
- Create and open a Rosetta Terminal, with ref here.
- Use system Python to create a virtual environment for the project
/usr/bin/python3 -m venv /PathToMockingBird/venv source /PathToMockingBird/venv/bin/activate - Upgrade pip and install
PyQt5pip install --upgrade pip pip install pyqt5
Both packages seem to be unique to this project and are not seen in the original Real-Time Voice Cloning project. When installing with
pip install, both packages lack wheels so the program tries to directly compile from c code and could not findPython.h.
-
Install
pyworldbrew install pythonPython.hcan come with Python installed by brewexport CPLUS_INCLUDE_PATH=/opt/homebrew/Frameworks/Python.framework/HeadersThe filepath of brew-installedPython.his unique to M1 MacOS and listed above. One needs to manually add the path to the environment variables.pip install pyworldthat should do.
-
Install
ctc-segmentationSame method does not apply to
ctc-segmentation, and one needs to compile it from the source code on github.git clone https://github.com/lumaku/ctc-segmentation.gitcd ctc-segmentationsource /PathToMockingBird/venv/bin/activateIf the virtual environment hasn't been deployed, activate it.cythonize -3 ctc_segmentation/ctc_segmentation_dyn.pyx/usr/bin/arch -x86_64 python setup.py buildBuild with x86 architecture./usr/bin/arch -x86_64 python setup.py install --optimize=1 --skip-buildInstall with x86 architecture.
/usr/bin/arch -x86_64 pip install torch torchvision torchaudioPip installingPyTorchas an example, articulate that it's installed with x86 architecturepip install ffmpegInstall ffmpegpip install -r requirements.txtInstall other requirements.
To run the project on x86 architecture. ref.
vim /PathToMockingBird/venv/bin/pythonM1Create an executable filepythonM1to condition python interpreter at/PathToMockingBird/venv/bin.- Write in the following content:
#!/usr/bin/env zsh mydir=${0:a:h} /usr/bin/arch -x86_64 $mydir/python "$@" chmod +x pythonM1Set the file as executable.- If using PyCharm IDE, configure project interpreter to
pythonM1(steps here), if using command line python, run/PathToMockingBird/venv/bin/pythonM1 demo_toolbox.py
Note that we are using the pretrained encoder/vocoder but not synthesizer, since the original model is incompatible with the Chinese symbols. It means the demo_cli is not working at this moment, so additional synthesizer models are required.
You can either train your models or use existing ones:
-
Preprocess with the audios and the mel spectrograms:
python encoder_preprocess.py <datasets_root>Allowing parameter--dataset {dataset}to support the datasets you want to preprocess. Only the train set of these datasets will be used. Possible names: librispeech_other, voxceleb1, voxceleb2. Use comma to sperate multiple datasets. -
Train the encoder:
python encoder_train.py my_run <datasets_root>/SV2TTS/encoder
For training, the encoder uses visdom. You can disable it with
--no_visdom, but it's nice to have. Run "visdom" in a separate CLI/process to start your visdom server.
-
Download dataset and unzip: make sure you can access all .wav in folder
-
Preprocess with the audios and the mel spectrograms:
python pre.py <datasets_root>Allowing parameter--dataset {dataset}to support aidatatang_200zh, magicdata, aishell3, data_aishell, etc.If this parameter is not passed, the default dataset will be aidatatang_200zh. -
Train the synthesizer:
python train.py --type=synth mandarin <datasets_root>/SV2TTS/synthesizer -
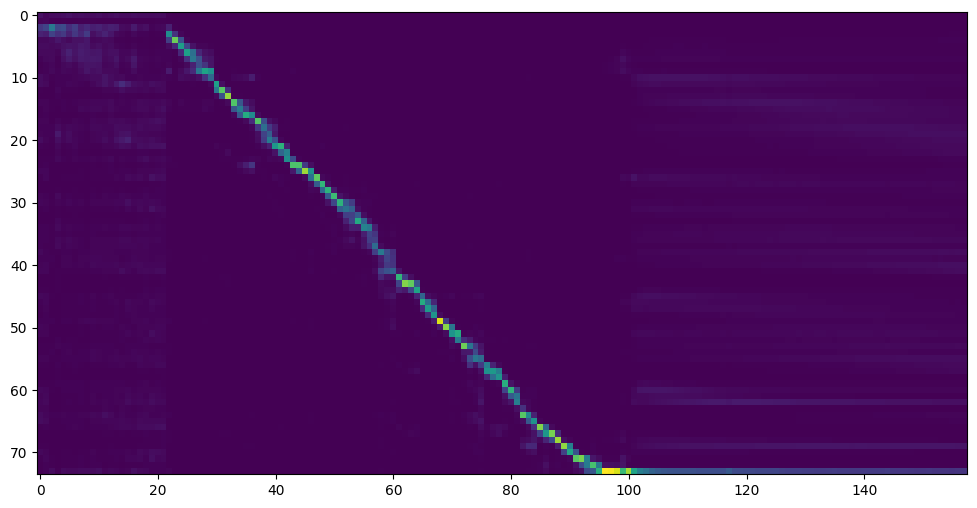
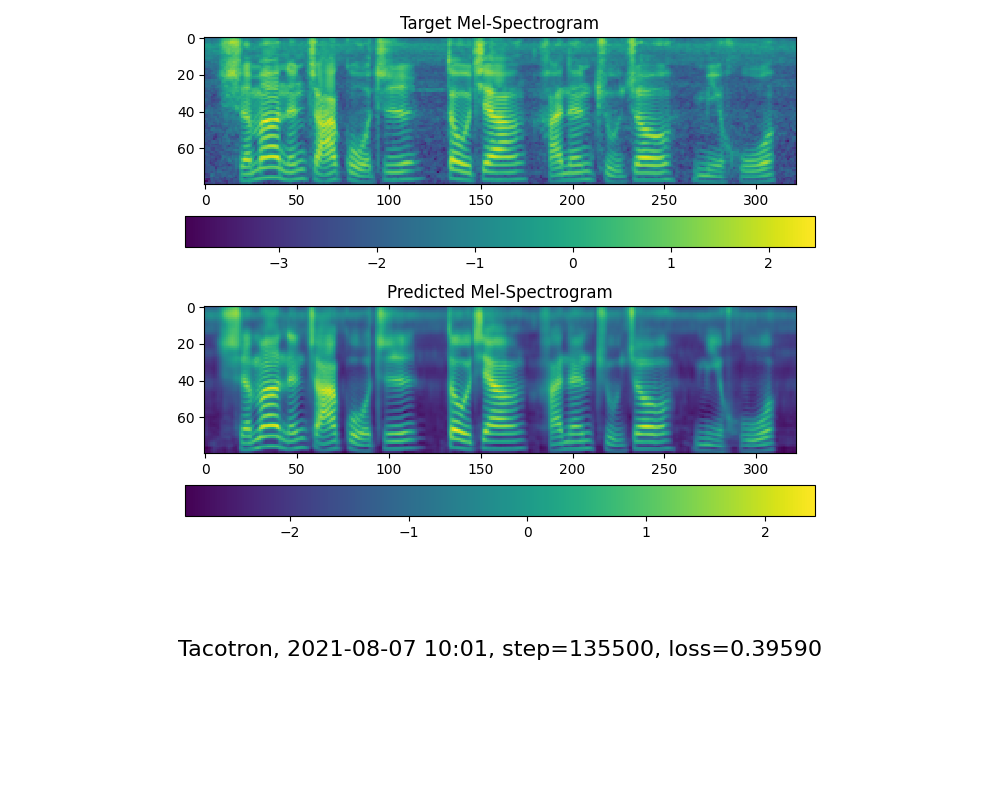
Go to next step when you see attention line show and loss meet your need in training folder synthesizer/saved_models/.
Thanks to the community, some models will be shared:
| author | Download link | Preview Video | Info |
|---|---|---|---|
| @author | https://pan.baidu.com/s/1iONvRxmkI-t1nHqxKytY3g Baidu 4j5d | 75k steps trained by multiple datasets | |
| @author | https://pan.baidu.com/s/1fMh9IlgKJlL2PIiRTYDUvw Baidu code:om7f | 25k steps trained by multiple datasets, only works under version 0.0.1 | |
| @FawenYo | https://yisiou-my.sharepoint.com/:u:/g/personal/lawrence_cheng_fawenyo_onmicrosoft_com/EWFWDHzee-NNg9TWdKckCc4BC7bK2j9cCbOWn0-_tK0nOg?e=n0gGgC | input output | 200k steps with local accent of Taiwan, only works under version 0.0.1 |
| @miven | https://pan.baidu.com/s/1PI-hM3sn5wbeChRryX-RCQ code: 2021 https://www.aliyundrive.com/s/AwPsbo8mcSP code: z2m0 | https://www.bilibili.com/video/BV1uh411B7AD/ | only works under version 0.0.1 |
note: vocoder has little difference in effect, so you may not need to train a new one.
- Preprocess the data:
python vocoder_preprocess.py <datasets_root> -m <synthesizer_model_path>
<datasets_root>replace with your dataset root,<synthesizer_model_path>replace with directory of your best trained models of sythensizer, e.g. sythensizer\saved_mode\xxx
-
Train the wavernn vocoder:
python vocoder_train.py mandarin <datasets_root> -
Train the hifigan vocoder
python vocoder_train.py mandarin <datasets_root> hifigan
You can then try to run:python web.py and open it in browser, default as http://localhost:8080
You can then try the toolbox:
python demo_toolbox.py -d <datasets_root>
You can then try the command:
python gen_voice.py <text_file.txt> your_wav_file.wav
you may need to install cn2an by "pip install cn2an" for better digital number result.
This repository is forked from Real-Time-Voice-Cloning which only support English.
| URL | Designation | Title | Implementation source |
|---|---|---|---|
| 1803.09017 | GlobalStyleToken (synthesizer) | Style Tokens: Unsupervised Style Modeling, Control and Transfer in End-to-End Speech Synthesis | This repo |
| 2010.05646 | HiFi-GAN (vocoder) | Generative Adversarial Networks for Efficient and High Fidelity Speech Synthesis | This repo |
| 2106.02297 | Fre-GAN (vocoder) | Fre-GAN: Adversarial Frequency-consistent Audio Synthesis | This repo |
| 1806.04558 | SV2TTS | Transfer Learning from Speaker Verification to Multispeaker Text-To-Speech Synthesis | This repo |
| 1802.08435 | WaveRNN (vocoder) | Efficient Neural Audio Synthesis | fatchord/WaveRNN |
| 1703.10135 | Tacotron (synthesizer) | Tacotron: Towards End-to-End Speech Synthesis | fatchord/WaveRNN |
| 1710.10467 | GE2E (encoder) | Generalized End-To-End Loss for Speaker Verification | This repo |
| Dataset | Original Source | Alternative Sources |
|---|---|---|
| aidatatang_200zh | OpenSLR | Google Drive |
| magicdata | OpenSLR | Google Drive (Dev set) |
| aishell3 | OpenSLR | Google Drive |
| data_aishell | OpenSLR |
After unzip aidatatang_200zh, you need to unzip all the files under
aidatatang_200zh\corpus\train
If the dataset path is D:\data\aidatatang_200zh,then <datasets_root> isD:\data
Train the synthesizer:adjust the batch_size in synthesizer/hparams.py
//Before
tts_schedule = [(2, 1e-3, 20_000, 12), # Progressive training schedule
(2, 5e-4, 40_000, 12), # (r, lr, step, batch_size)
(2, 2e-4, 80_000, 12), #
(2, 1e-4, 160_000, 12), # r = reduction factor (# of mel frames
(2, 3e-5, 320_000, 12), # synthesized for each decoder iteration)
(2, 1e-5, 640_000, 12)], # lr = learning rate
//After
tts_schedule = [(2, 1e-3, 20_000, 8), # Progressive training schedule
(2, 5e-4, 40_000, 8), # (r, lr, step, batch_size)
(2, 2e-4, 80_000, 8), #
(2, 1e-4, 160_000, 8), # r = reduction factor (# of mel frames
(2, 3e-5, 320_000, 8), # synthesized for each decoder iteration)
(2, 1e-5, 640_000, 8)], # lr = learning rate
Train Vocoder-Preprocess the data:adjust the batch_size in synthesizer/hparams.py
//Before
### Data Preprocessing
max_mel_frames = 900,
rescale = True,
rescaling_max = 0.9,
synthesis_batch_size = 16, # For vocoder preprocessing and inference.
//After
### Data Preprocessing
max_mel_frames = 900,
rescale = True,
rescaling_max = 0.9,
synthesis_batch_size = 8, # For vocoder preprocessing and inference.
Train Vocoder-Train the vocoder:adjust the batch_size in vocoder/wavernn/hparams.py
//Before
# Training
voc_batch_size = 100
voc_lr = 1e-4
voc_gen_at_checkpoint = 5
voc_pad = 2
//After
# Training
voc_batch_size = 6
voc_lr = 1e-4
voc_gen_at_checkpoint = 5
voc_pad =2
4.If it happens RuntimeError: Error(s) in loading state_dict for Tacotron: size mismatch for encoder.embedding.weight: copying a param with shape torch.Size([70, 512]) from checkpoint, the shape in current model is torch.Size([75, 512]).
Please refer to issue #37
Adjust the batch_size as appropriate to improve
Please refer to this video and change the virtual memory to 100G (102400), for example : When the file is placed in the D disk, the virtual memory of the D disk is changed.
FYI, my attention came after 18k steps and loss became lower than 0.4 after 50k steps.